
Introduction
The Vl53l1x seemed to be like the most ideal sensor, with a 4m range, minimal blind spots of 3cm, modifiable ROI, and a comparitively affordable price tag of 15SGD apiece. To add icing to the cake, previous batches of students have also used this sensor for localization and have given it glowing reviews.
Roadblocks
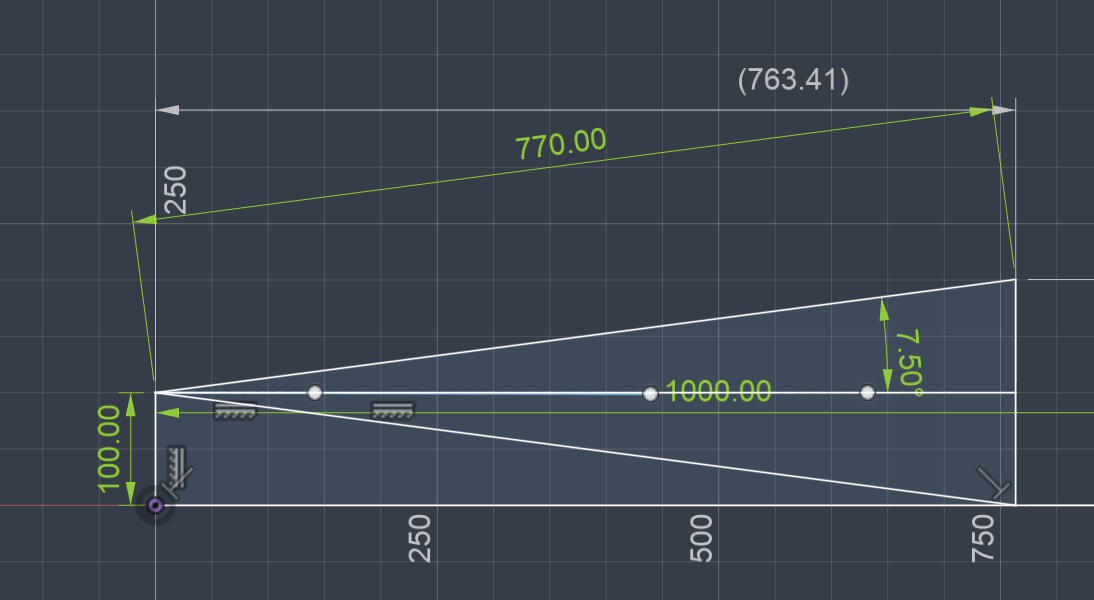
Unfortunately, the Vl53l1x proved to be a extremely unreliable sensor, due to 2 main reasons. Firstly, the FOV of the sensor is 15 degrees, and since the wall of the fields is only 20cm, the sensor is unable to detect the wall any furthur than 80cm away (see diagram above). This is due to the fact that some of the infared rays will bounce off the floor or just be directed over the wall, giving inaccurate and very noisy readings. Secondly, the rate of measurement of the sensor is woefully slow, with a minimum of 33ms of timing budget for medium range distances. In practise, this would probably be increased to 50-100ms to increase accuracy at distances of 2m. This would give a refresh rate of 10 - 20 Hz, which is simply too slow.
Concluding Remarks
Now credit must be given when its due, and the TOF has a small form factor and is extremely lightweight. Furthurmore, it is somewhat accurate in detecting the wall at short distances. The Vl53l1x surely can be integrated seamlessly into other IOT applications, but perhaps it just did just as well in our use case.